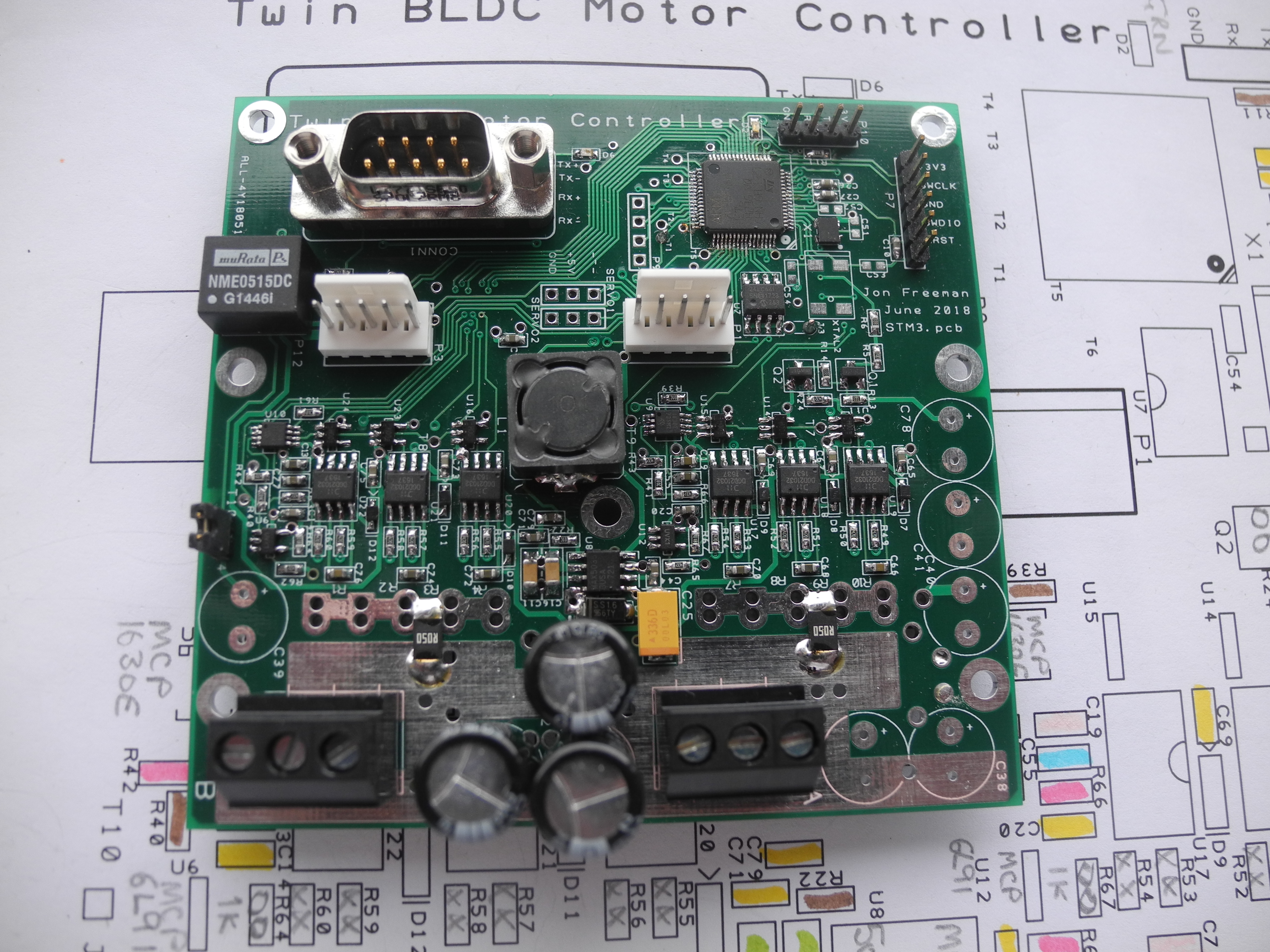
STM3_EMC - Electronic Motor Controller - Features
Formerly undersold as a mere 'ESC', 'Electronic Speed Controller', this Electronic Motor Controller (EMC) gives total control over motor speed, torque, acceleration, voltage, current and regenerative braking effort.
Rugged Proven Design - 100% reliable through two years and nearly 200 miles of public passenger hauling duty at Ashton Court and Vivary Park
Reliable? - Since the June 2018 product launch the STM3_EMC has sold to clients in industry, robotics and model engineering. To date (Oct 2021), the total number returned for any reason, is ZERO !! 'nuff said.
Update Feb 2023 - Number of returns still Zero!
The 'Brushless Brute' locomotive runs on two bogies each of which has two powered axles. One STM3 EMC controller board is fitted to each bogie providing total high efficiency power, current, voltage and speed control - full four quadrant control, bidirectional with Regenerative Braking.
See a video of four STM3 EMC boards driving a selection of motors, rated from 100 to 1900 Watt (looks best at 'Full Screen')
- Controls one or two Brushless Motors
- Wide supply voltage range :- 10 to 62 volts
- 0 to 50 Amp per motor under user control
- Versatile Voltage, Current and Power Control
- Versatile Speed and/or Torque Control modes
- Four Quadrant control - drive and regen-brake
- Ganged (Loco) and Independent (Robotics) mode
- User settable Speed Control (and other settings)
- Compact 3.5 x 3.7 inch board size
- Massive overload margin for high reliability
- Two Servo In/Out ports
- Multi control options :- RC, hand controller, RS432
Also drives multiple brushed DC motorsgone 8/2020.
'Brushless Brute' locomotive uses two bogies, each has two brushless motors, powered and controlled by one STM3 EMC module, all four loco axles under fully controlled power. See a short vid of loco in action
Join us for a whole lap around the beautiful track at Bristol Ashton Court
How It Works
An ARM Cortex controller is at the heart of the design. This accepts commands from any of the multiple inputs, and using advanced PWM (Pulse Width Modulation) techniques, provides independent control of voltage applied to, and peak current drawn by, each motor. A 'Regenerative Braking' mode enables conversion of mechanical power returning it to the system electrical power supply. This gives full four quadrant control : - Motoring and braking in both forward and reverse.
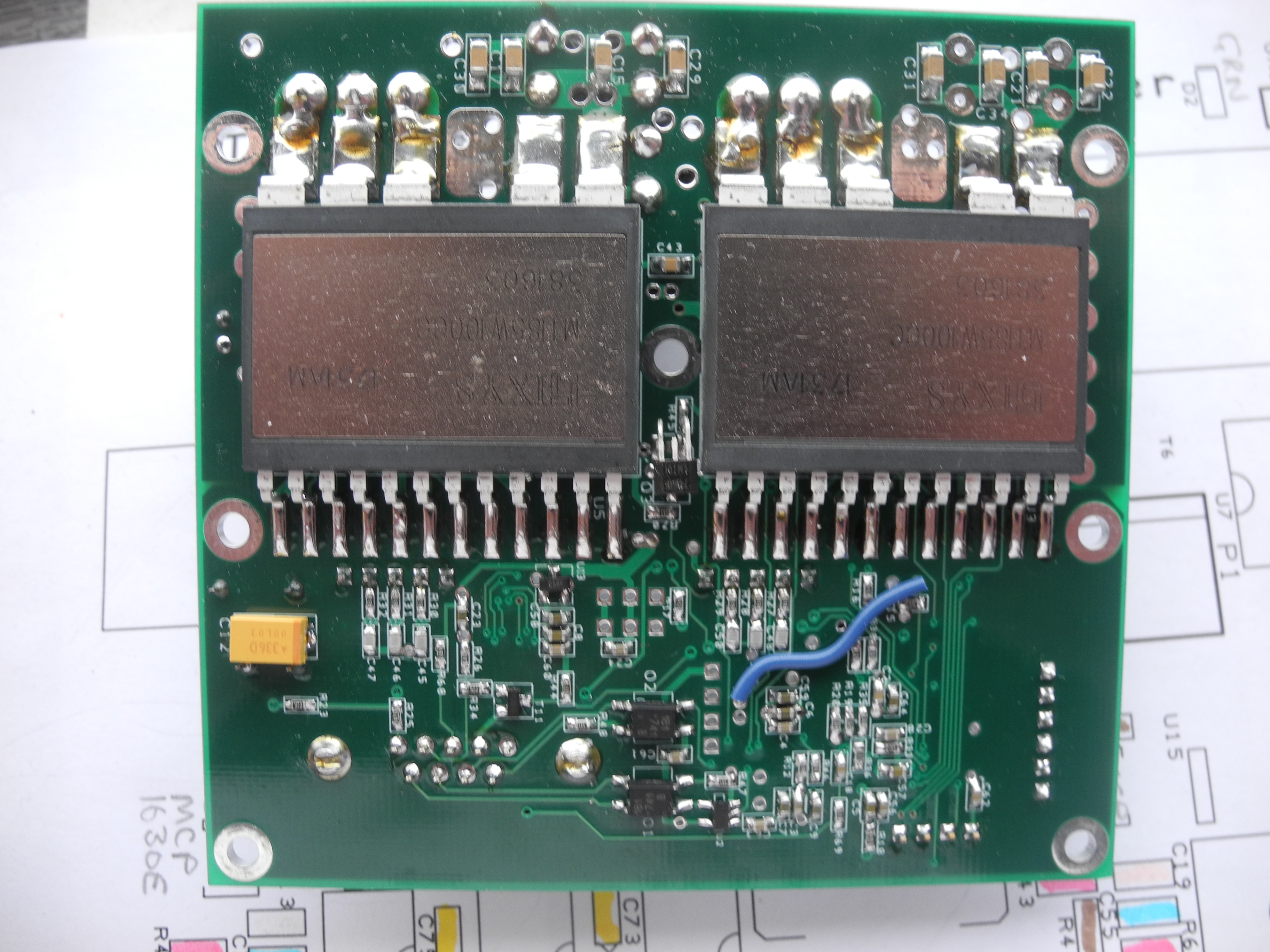
Massively rated 100V 120A MOSFET modules provide rugged and overload-protected outputs.
(That's it for the simple description. If you are interested in this board and you are experienced in electronics and engineering, the technical info below should give you all you need to build your own. If not, I have agreed to build a few for club members although I've plenty of other things to be doing, so contact me if you wish.)
Using Radio Control
A Radio Control receiver may be connected to the STM3_ESC. Using one or two channels, two motors can be controlled in tandem or independently. A Radiolink R8EF receiver was used during test and development but any similar should work. The receiver is powered by the STM3_EMC. External batteries or power sources ** Must Not ** be used, connection is made between receiver and EMC using one or two three conductor leads only, and no batteries.
See 'User Settings' below to find out how to setup the STM3_EMC for use with radio control.
Technical Stuff for Engineers
Everything you need to build your own STM3_EMC is here.
Two schematic sheets 1 -2 (Note R12 on sheet 2 should be 470R, not 1k)
Zip of PCB Gerber files, right click and 'save as' here
Update on Code - July 2021
Technology and time moves on. The Mbed online compiler is no longer 'preferred', code development has migrated to 'Mbed Studio', enabling many upgrades, including migration from Mbed OS2 to OS6. Latest source code is not published at present, latest binaries always available - see STM3_EMC User Manual page.
BOM (prices unlikely to be accurate) here
To follow - some useful data sheets
And that's your lot !
For Sale - STM3_EMC Controllers
Boards are produced in small batches so contact us for availability and to place orders.
Prices - no VAT, excluding carriage :-
- 1+ £225
- 3+ £180
- 8+ £155